Tracking with Online Multiple Instance Learning
Ongoing Project
Project Lead(s)
Synopsis
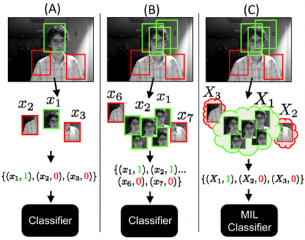
In this project we address the problem of tracking an object in a video given its location in the first frame and no other information. Recently, a class of tracking techniques called ``tracking by detection'' has been shown to give promising results at real-time speeds. These methods train a discriminative classifier in an online manner to separate the object from the background. This classifier bootstraps itself by using the current tracker state to extract positive and negative examples from the current frame. Slight inaccuracies in the tracker can therefore lead to incorrectly labeled training examples, which degrade the classifier and can cause further drift. In this paper we show that using Multiple Instance Learning (MIL) instead of traditional supervised learning avoids these problems, and can therefore lead to a more robust tracker with fewer parameter tweaks. We propose a novel online MIL algorithm for object tracking that achieves superior results with real-time performance. We present thorough experimental results (both qualitative and quantitative) on a number of challenging video clips.